
Por João d’Abreu Vilhete e Julio Cesar dos Reis
[Este artigo é versão de capítulo do livro Tecnologia e Educação – passado, presente e o que está por vir, organizado por José Armando Valente, Fernanda Maria Pereira Freire e Flávia Linhalis Arantes]
No mundo repleto de dispositivos dotados de tecnologias digitais em que vivemos na atualidade, a cada momento surgem novidades, aprimoramentos e aperfeiçoamentos na maneira como acessamos informações e percebemos o nosso entorno. A forma como executamos determinadas tarefas, sobretudo as de natureza repetitiva, altera-se a cada dia. É neste contexto que a robótica pode ser inserida como uma área de conhecimento voltada ao uso de recursos de software, hardware e circuitos eletrônicos que, quando combinados, possibilitam automatizar inúmeras tarefas que fazem parte do nosso dia a dia. Ampliar a utilização da robótica para o contexto educacional é o propósito da robótica pedagógica (RP) que aqui apresentamos. Há mais de três décadas a RP vem enriquecendo a forma de se ensinar conceitos científicos/tecnológicos. A metodologia de implantação de RP no ensino pode envolver desenvolvimento de projetos que visam a formação de professores para seu uso integrado ao currículo.
Introdução
A RP é uma área de conhecimento que integra diversas disciplinas. Nas escolas, muitas vezes, é inserida como forma de se buscar uma abordagem interdisciplinar e propiciar o uso de tecnologias na educação. Essas tecnologias envolvem o uso de kits e de materiais para a montagem de robôs, software para programá-los e, consequentemente, computadores (nos seus mais variados modelos e formatos) para programar a automação e o controle do robô construído. Adicionalmente, esses aspectos devem ser orientados por uma metodologia para potencializar/qualificar o uso da RP como ferramenta capaz de diversificar e enriquecer o ambiente de ensino e aprendizagem nos mais diferentes níveis, do básico ao superior.
O desenvolvimento da RP no Núcleo de Informática Aplicada à Educação (Nied) da Universidade Estadual de Campinas (Unicamp) está fortemente ligado ao processo de introdução do computador na educação no Brasil. Esse processo se iniciou por volta de 1980, antes do surgimento da internet, e tomou outros contornos com a sua chegada. A RP vem evoluindo à medida que novos recursos tecnológicos de hardware e de software para automação e controle de dispositivos robóticos surgem no mercado.
Este artigo apresenta contribuições no contexto da RP de iniciativas e projetos desenvolvidos no Nied. Iniciamos por uma retrospectiva histórica de ambientes de RP construídos na década de 1980. Em seguida, apresentamos contribuições em diferentes perspectivas sobre RP: no processo de formação de professores, RP de baixo custo e RP voltada para ambientes de aprendizagem que propiciam autonomia para pessoas com deficiência, o que mostra a sua relevância em processos de ensino e aprendizagem. Depois descrevemos como a RP está sendo utilizada atualmente, considerando a internet das coisas (IoT, na sigla em inglês), e analisamos o seu potencial em iniciativas voltadas ao desenvolvimento do pensamento computacional e de uma educação criativa. Finalmente, apresentamos perspectivas futuras e desafios de pesquisa que envolvem novas formas de interação em ambientes de RP.
Robótica pedagógica no Nied: antecedentes históricos
Para d’Abreu (2014) a RP desenvolvida no Nied se iniciou no ano de 1987, com os primeiros projetos voltados para o uso do computador para controlar dispositivos robóticos por meio da linguagem de programação Logo. Esses dispositivos eram o traçador gráfico educacional e a tartaruga mecânica de solo que, dotados de uma caneta, reproduziam no papel ou no chão, respectivamente, os movimentos da tartaruga de tela do computador. Nessa época, o lema informalmente usado no Nied era “dar músculos ao computador”, isto é, fazer com que o computador, além de executar programas, pudesse controlar dispositivos robóticos conectados a ele.
O ambiente Lego-Logo foi desenvolvido com o surgimento dos primeiros kits de brinquedo Lego®, importados dos Estados Unidos. Esses kits possuíam componentes elétricos (motor, sensor e luz), capazes de serem controlados pelo computador. O ambiente Lego-Logo consistia de um conjunto de peças Lego para montagem de robôs (máquinas e animais) e de um conjunto de comandos da linguagem de programação Logo para programar as tarefas que o robô iria executar. Nessa ocasião, pré-internet, além do desenvolvimento de comandos “primitivos” em Logo para controlar componentes elétricos (motores, sensores, solenoides etc.), interfaces eletrônicas eram igualmente desenvolvidas para permitir a conexão/comunicação dos dispositivos robóticos com o computador MSX de 8 bits.
A figura abaixo apresenta uma interface eletrônica desenvolvida e patenteada na época.

A figura a seguir apresenta a interface conectada a um computador MSX de 8 bits.

Nesse percurso, em 1989, o Nied realizou a primeira oficina de RP, ministrada por um pesquisador do Massachusetts Institute of Technology (MIT), Steve Ocko, com a finalidade de preparar os pesquisadores do núcleo para a utilização de robótica no contexto educacional. Uma vez finalizado esse processo, como forma de difusão do conhecimento adquirido, pesquisadores do Nied passaram a realizar a formação de professores no Brasil.
Apresentamos a seguir quatro contribuições para a RP desenvolvidas no Nied, considerando: (1) a formação de professores; (2) o uso de materiais de baixo custo; (3) ambientes de aprendizagem que propiciam autonomia para pessoas com deficiência; (4) exemplos práticos de projetos atuais desenvolvidos.
Robótica pedagógica no processo de formação de professores
Para d’Abreu (2014) o processo de formação de professor é uma ação altamente relevante e indispensável no contexto da RP desenvolvida no Nied. Por meio desse processo o Nied formou, a partir de 1993, professores dos centros de informática na educação (CIEds) de diversas regiões do país.
Com o surgimento dos computadores pessoais (PCs), lentamente, os computadores MSX passaram a ser substituídos. Utilizando o software TcLogo, uma versão do Logo para PC, por volta de 1997, passou-se a desenvolver robótica utilizando esse equipamento em algumas instituições no Brasil, em países da América Latina e nos Estados Unidos. O Nied explorou esse ambiente, em uma situação não formal de aprendizagem, para ensinar conceitos de automação para operários de uma fábrica no Brasil. A figura a seguir apresenta um exemplo de PC equipado com TcLogo sendo usado em uma fábrica.

No processo de formação de professores para o uso da RP na escola eram realizadas palestras para alunos, professores e a direção escolar. Em seguida, eram ministradas oficinas piloto, que possibilitavam o aprendizado dos conceitos e princípios básicos para desenvolvimento de projetos de robótica. Em seguida, os professores iniciavam o desenvolvimento de atividades com seus alunos. Nessa fase, normalmente, os professores eram assessorados pelos pesquisadores da universidade que iam à escola para acompanhar o processo[1]. Terminada essa fase ocorria a consolidação da RP na escola: professores, com apoio da direção escolar, desenvolviam atividades com os alunos visando a sustentabilidade do projeto e a implantação da RP no currículo. Na sequência, podia-se avaliar se a cultura de uso da RP havia se incorporado às atividades pedagógicas da escola (d’Abreu e Garcia, 2016).
Durante o processo de formação, os professores desenvolviam tarefas com vistas a explorar o aprendizado de conceitos científicos em um ambiente de RP envolvendo três aspectos fundamentais:
Concepção e design do dispositivo robótico: Discussão sobre o desenvolvimento de um robô, propriamente dito. Nessa oportunidade, com base na proposta da tarefa a ser executada, o grupo de professores em formação discutia e decidia sobre que tipo de robô poderia ser desenvolvido para a condução das atividades pedagógicas.
Construção e implementação: Fase de montagem do robô, considerando a implementação do sistema mecânico do dispositivo robótico, por exemplo: um carro, um elevador, um androide etc.
Automação: Elaboração de programas para automação e controle do robô. Desenvolvimento de programas em uma determinada linguagem de programação que, ao serem executados, possibilitavam que o robô realizasse uma determinada tarefa.
Robótica pedagógica de baixo custo
Segundo d’Abreu et al. (2012), a robótica pedagógica de baixo custo (RPBC) tem sido impulsionada pelo barateamento dos equipamentos eletrônicos e o acesso aos computadores, sobretudo laptops, celulares, sem falar na facilidade de acesso a recursos de hardware e software livres, passíveis de serem baixados pela internet, permitindo o uso por qualquer pessoa que queria trabalhar com robótica.
No Nied, experiências de utilização de RPBC têm sido vivenciadas nos últimos anos considerando projetos de âmbito governamental, utilizando computadores de baixo custo do tipo XO e classmate. Isso tem tornado a implementação de atividades de RP mais simples na medida em que placas de hardware de interface eletrônica (como o Arduino e seus similares) e software educacional (como o Scratch e outros) tornaram-se de mais fácil acesso.
Robótica pedagógica e inclusão de pessoas com deficiência
Uma das frentes de pesquisa em RP do Nied desenvolve projetos de inclusão voltados para pessoas com deficiência visual. Nesse contexto, estudos têm sido feitos com base em mapas táteis e sonoros que expressam conceitos do design universal, uma proposta de design que visa obter soluções que não segregam os usuários e incorporam orientações de acessibilidade.
Essa iniciativa de pesquisa integra pesquisadores do Nied e da Faculdade de Engenharia Civil, Arquitetura e Urbanismo da Unicamp e envolve alunos de engenharia mecânica/mecatrônica, engenharia elétrica/eletrônica e arquitetura. Um dos enfoques da pesquisa é a concepção, implementação e a disponibilização de recursos tecnológicos que permitem a pessoas com deficiência visual obterem informação de forma autônoma, fácil e segura sobre locais por onde circulam, sobretudo no espaço urbano: parada de ônibus; estação de transporte coletivo; saguão de entrada de prédios etc.
O mapa tátil e sonoro é um equipamento que tem sido utilizado para esse fim. Do ponto de vista histórico, a utilização e manipulação de maquete tátil sonora e/ou mapa tátil sonoro como ferramenta para propiciar autonomia no uso de um ambiente físico faz parte, desde 2003, de uma das linhas de pesquisa em RP do Nied.
Essa atividade iniciou com um projeto desenvolvido entre os anos de 2003 e 2005, em uma escola pública no município de Araras-SP, por meio de uma parceria entre o Nied e Centro de Análise e Planejamento Ambiental – Ceapla/Unesp, Rio Claro, estado de São Paulo. Nessa ocasião, dispositivos robóticos foram implementados para serem usados por alunos com deficiência intelectual, auditiva e visual.
A partir de 2009, com a aprovação do projeto Orientação Espacial no Campus da Unicamp que tinha o objetivo de desenvolver um mapa de uso tátil e sonoro como ferramenta de auxílio ao percurso do usuário no campus, a atividade passou a ser realizada com pesquisadores da Faculdade de Engenharia Civil, Arquitetura e Urbanismo da Unicamp que atuavam nessa linha de estudo. Essa parceria tem possibilitado novas pesquisas e avanços que têm contribuído com ações afirmativas na área da inclusão social e digital de pessoas com deficiência visual.
As pesquisas atuais nessa área estão direcionadas para o desenvolvimento de mapas táteis e sonoros com comunicação por smartphone. Para tanto, estão sendo implementados aplicativos (app’s) para realizar a leitura de tags (sensores eletrônicos) distribuídas em diversos pontos de interesse em um mapa tátil e sonoro. Pessoas com deficiência visual, diante do mapa, poderão utilizar o próprio celular para obter autonomamente informações sonoras para a sua orientação espacial. Adicionalmente, testes de usabilidade do mapa tátil e sonoro com essa configuração estão sendo realizados junto ao seu público alvo.
Exemplo de projetos atuais
Apresentamos dois exemplos de uso da RP realizados no Nied: O exemplo 1 se fundamenta no contexto tradicional de aprendizagem de conceitos de automação e de controle envolvendo usos de sensores e atuadores. O exemplo 2 envolve o aprendizado de circuitos eletrônicos e usa o celular para controle dos artefatos.
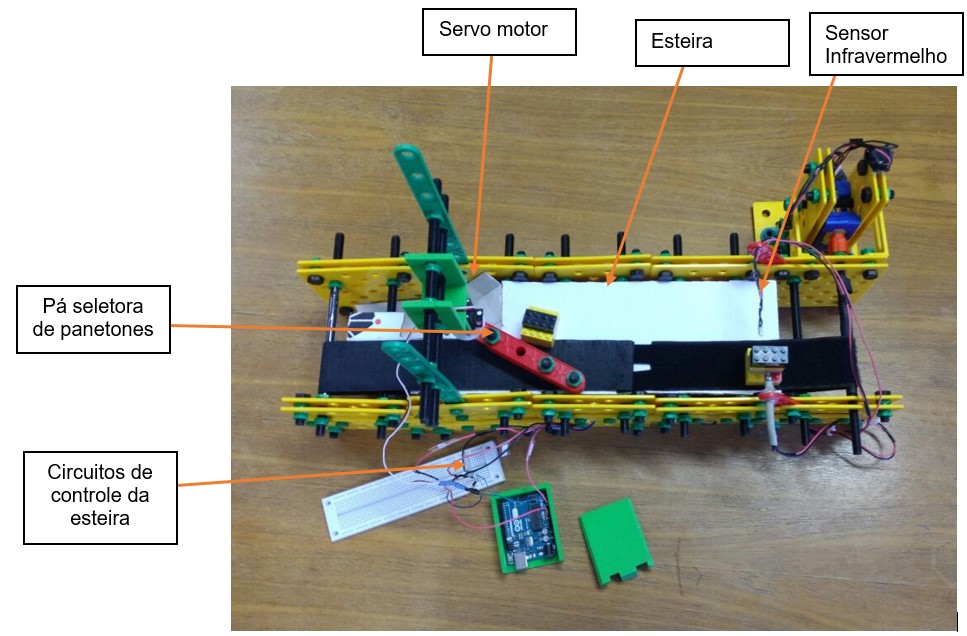
Exemplo 1 – “Sistemas elétricos: aplicação na robótica pedagógica”: Esse projeto consistiu na elaboração de uma esteira seletora de panetones (figura a seguir) que funciona como um instrumento de controle de qualidade, separando os panetones impróprios para comercialização dos demais. Esse controle foi feito com base na altura atingida pelo panetone no forno, considerando que um bom panetone cresce e um panetone de baixa qualidade não atinge uma altura mínima esperada.
Na elaboração desse projeto utilizamos sensores infravermelhos (constituídos de um emissor e receptor de luz). Ao serem colocados frente a frente os sensores geram um sinal analógico quando há variação de luminosidade. Caso um objeto interfira no sinal, uma instrução é enviada para um mecanismo do sistema denominado “servo motor” que movimenta uma pá que seleciona o produto. O sensor infravermelho é alinhado e calibrado de maneira que possa fazer uma leitura correta do panetone alto (dentro do padrão para ser comercializado). Assim, quando o sensor for acionado, o mecanismo “servo motor” move a pá e direciona o panetone para a área dos produtos considerados dentro do padrão. A não detecção pelo sensor é um indício de que somente panetones fora do padrão estão na esteira; logo, o mecanismo “servo motor” se posiciona de forma que os produtos sejam selecionados para descarte.
Construção de uma esteira seletora de panetones:
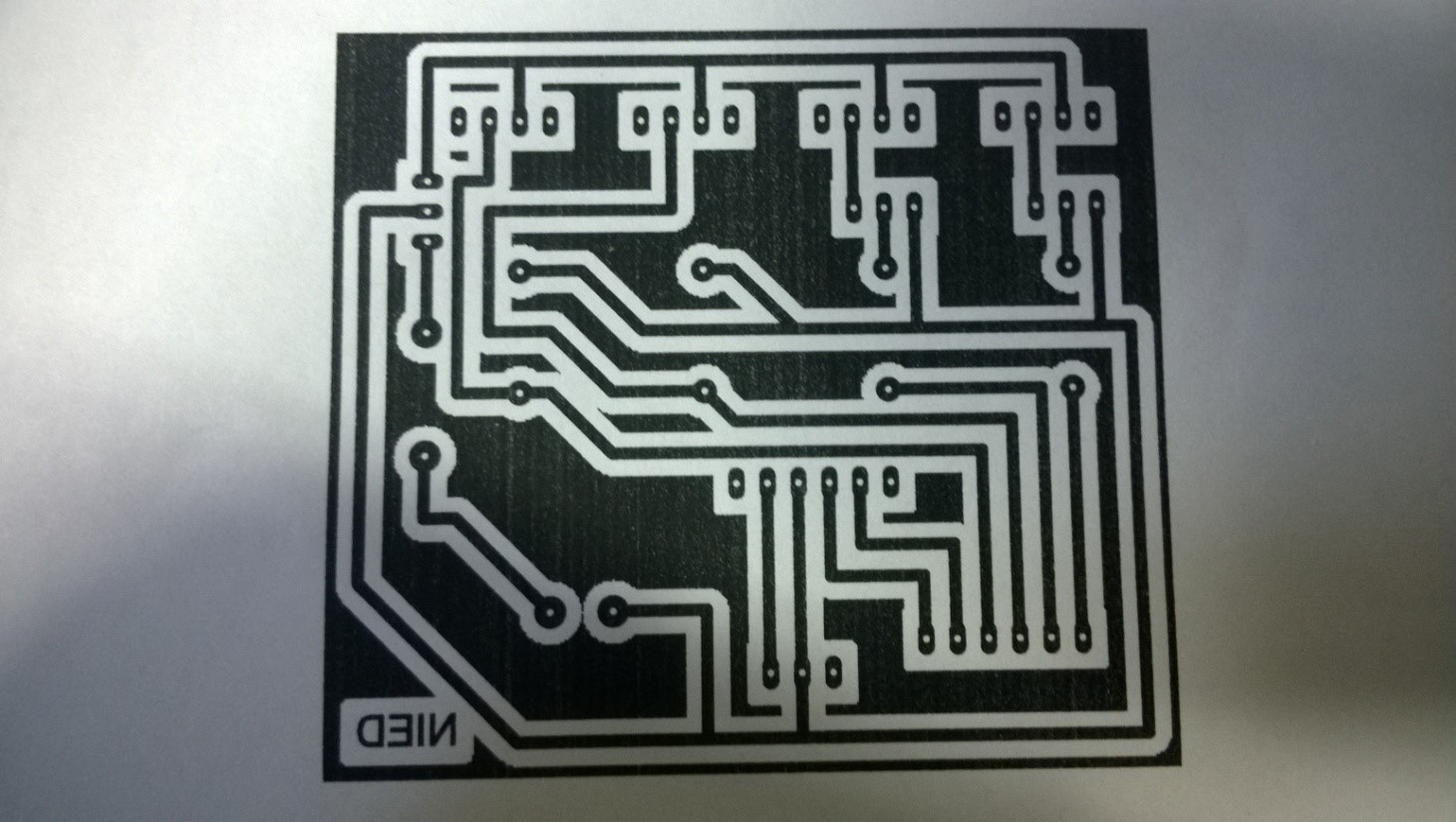
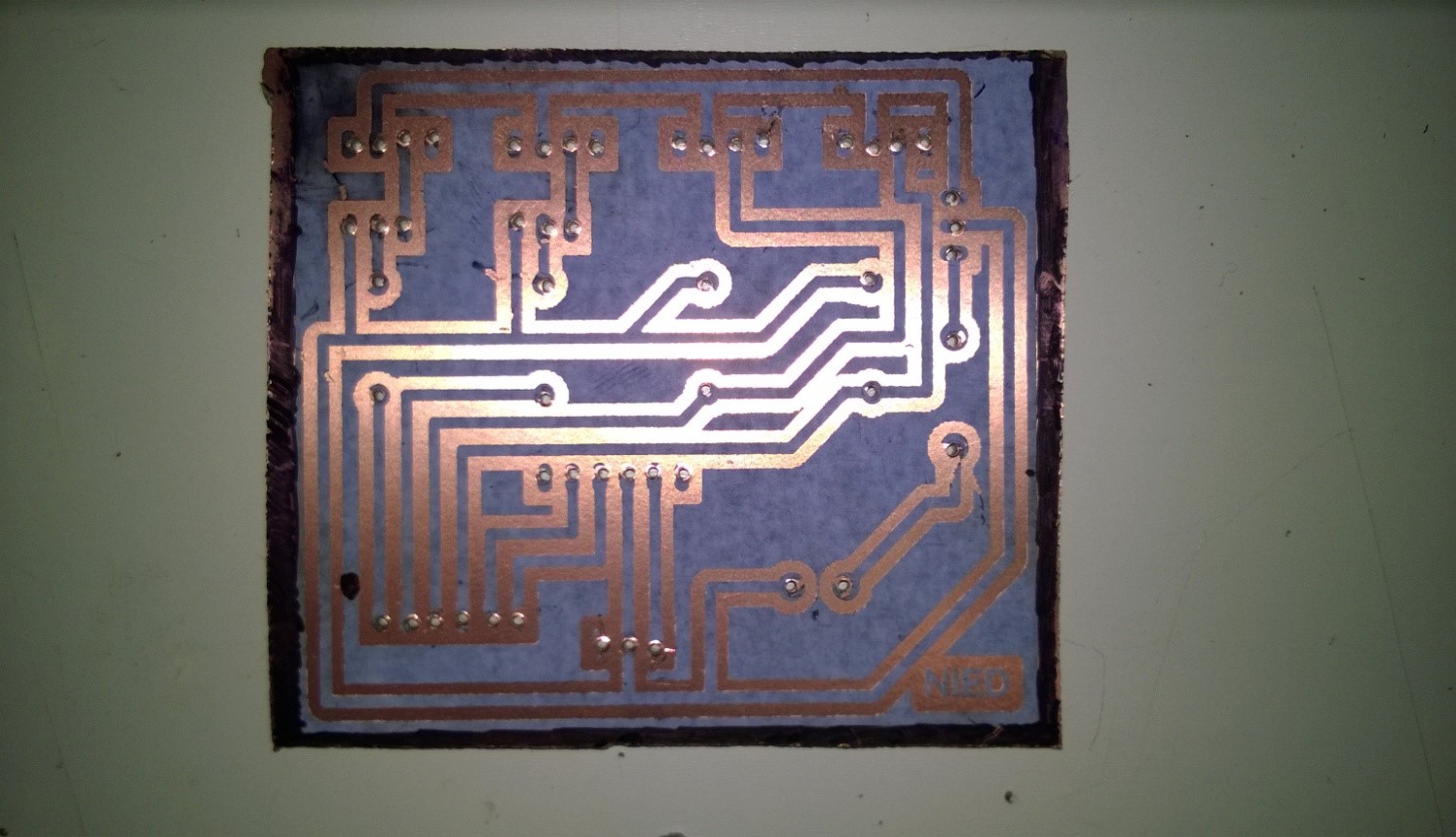
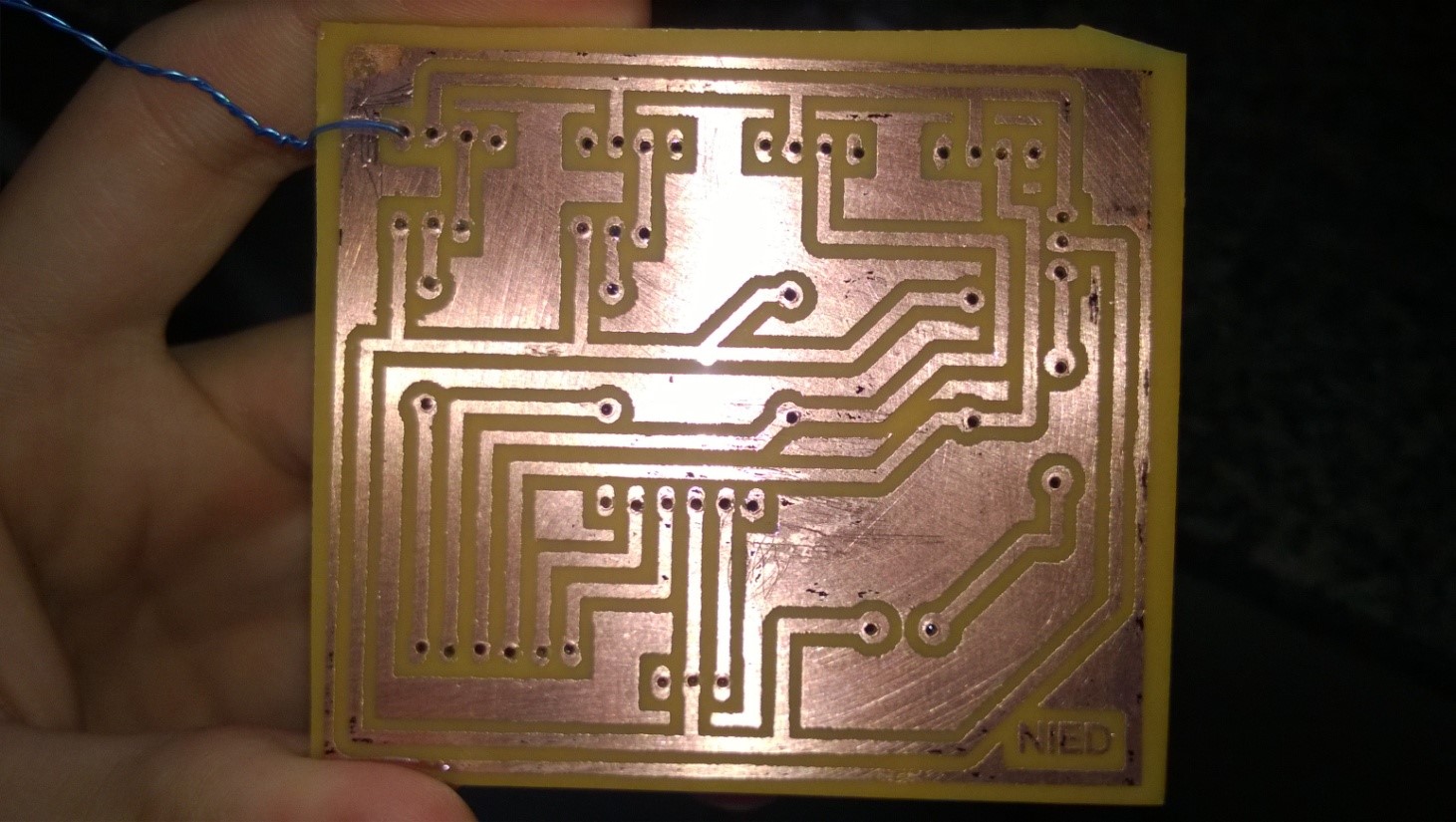
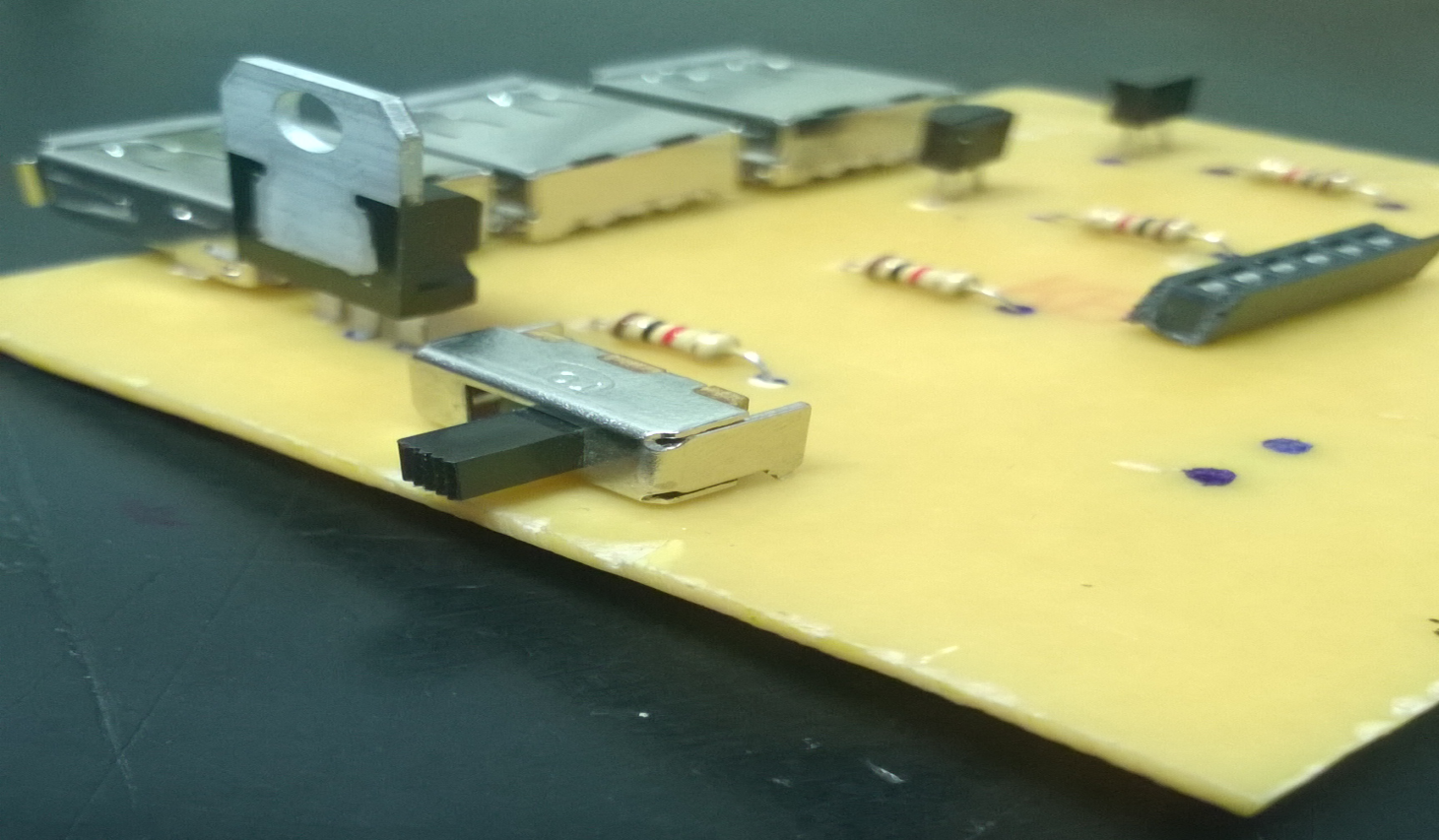
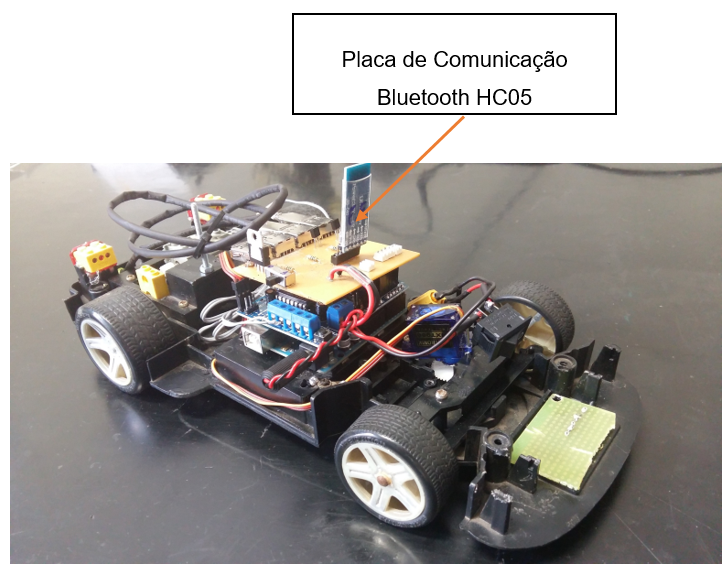
Exemplo 2 – “Construção de um dispositivo robótico controlado pelo celular”: Embora existam no mercado placas de circuitos eletrônicos para uma infinidade de tarefas, algumas situações demandam a implementação de placas específicas. Esse foi o caso da construção de um dispositivo robótico para controlar um carro de brinquedo a partir de um aplicativo de celular. A figura a seguir apresenta a sequência de etapas que ilustra esse processo e que culminou na elaboração de circuitos. As etapas envolveram desde o projeto do circuito, sua impressão na placa de cobre, incluindo a solda dos componentes na placa.
Etapas de construção de uma placa específica para controle de um carro de brinquedo via celular
 |
 |
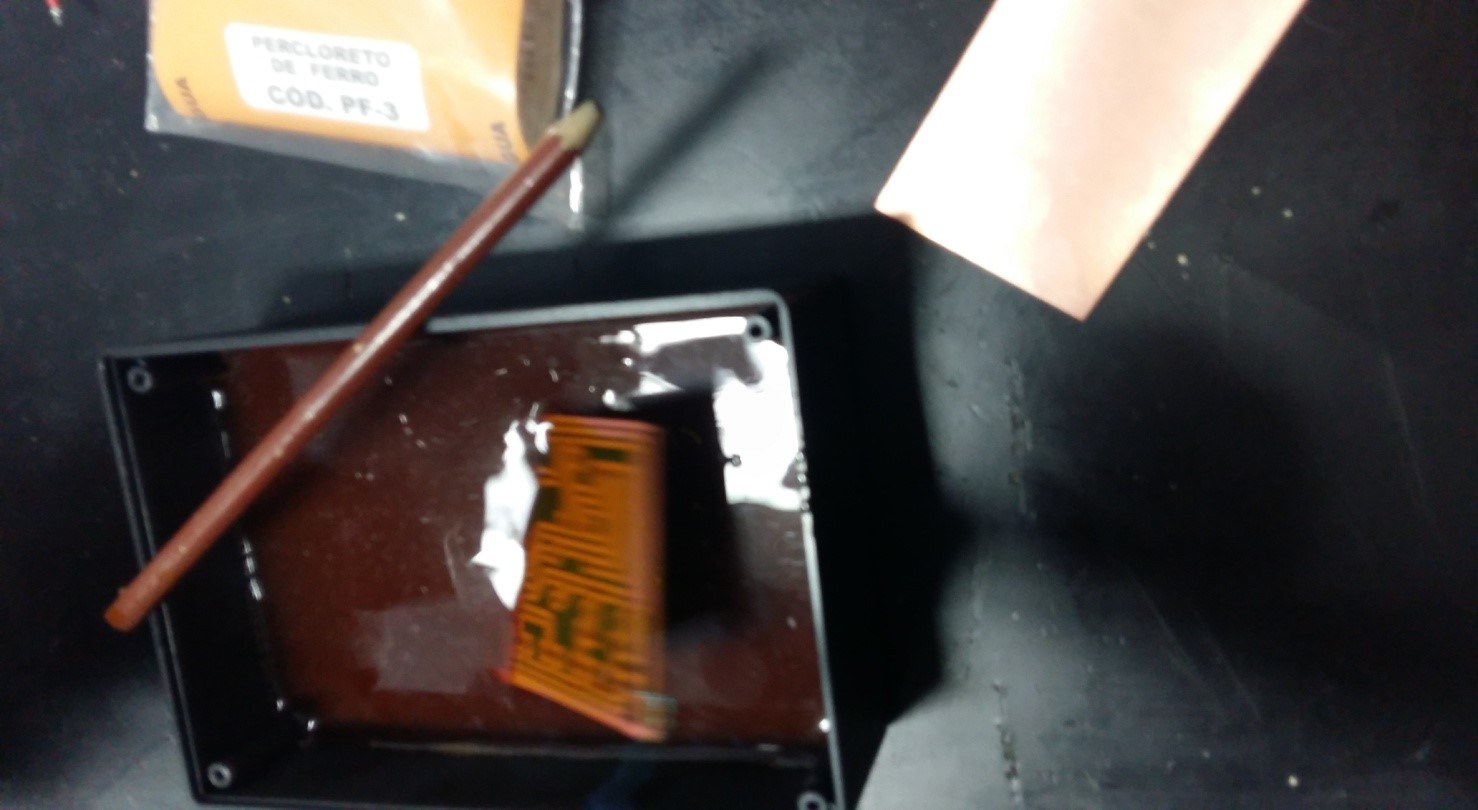 |
| Etapa 1 – Impressão do circuito em papel glossy | Etapa 2 – Circuito impresso na placa de cobre | Etapa 3 – Placa corroída para retirada de partes que não são do circuito |
 |
 |
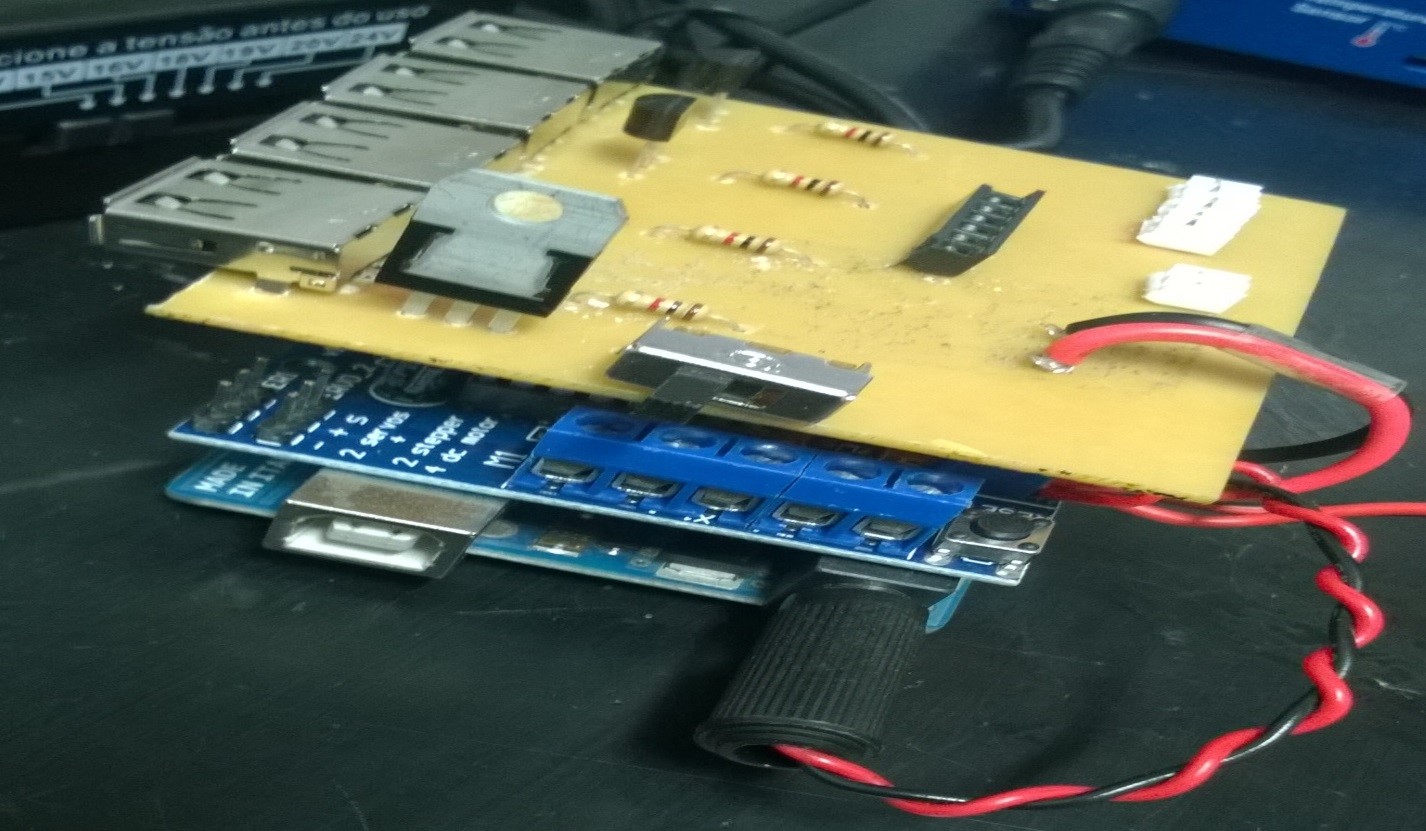 |
| Etapa 4 – Placa corroída e lavada | Solda dos componentes na placa | Placa acoplada à plataforma Arduino |
A construção da placa permitiu o uso do celular para controlar o carro, via bluetooth.
Exemplo de carro de brinquedo controlado por celular via bluetooth:
Os dois exemplos envolvem aquilo que, na atualidade, tem sido denominado de aprendizagem criativa, “cultura maker”, robótica de baixo custo uma vez que os dispositivos foram construídos a partir de propostas dos próprios alunos, do reaproveitamento de materiais e/ou de peças, e de componentes retirados de outras construções.
É importante ressaltar que, nesse processo, a concepção e a construção se dão em um contexto no qual se privilegiam a aprendizagem e a apropriação, de forma que conceitos científicos possam ser explorados, isto é, a RP é praticada em situações propícias para desenvolver conceitos e realizar experimentações científicas.
Robótica pedagógica e novas tecnologias de interação
No contexto atual, há diversas frentes de investigação que visam o aprimoramento da RP e seu funcionamento com tecnologias recentes e novas formas de interação propiciadas por seus ambientes. Por exemplo, no contexto da internet das coisas, projetos têm sido centrados na realização de atividades de concepção, montagem, automação e controle de dispositivos robóticos em comunicação remota com objetos (coisas).
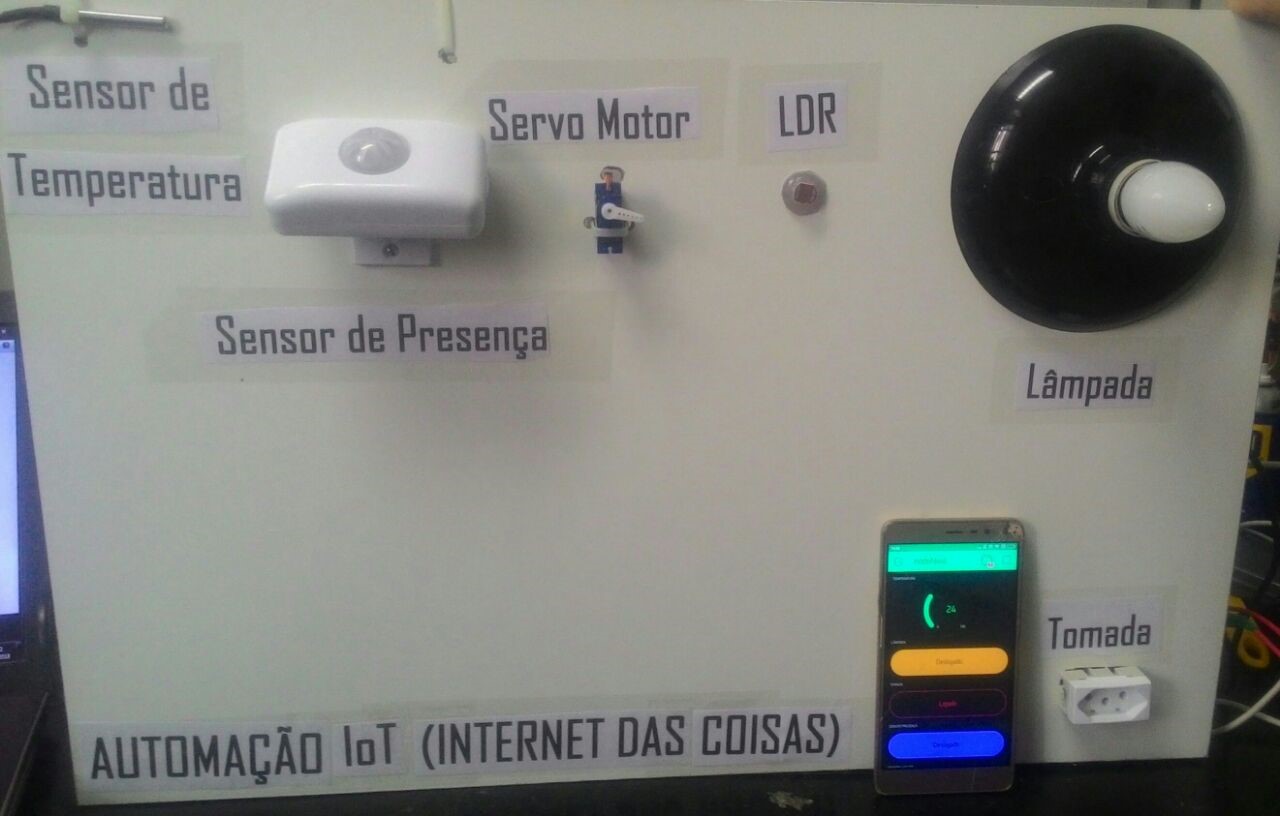
Um dos programas da Unicamp em que essas atividades têm sido desenvolvidas é o Ciência e Arte nas Férias (CAF). Por exemplo, o projeto desenvolvido no CAF 2018 fez a automatização de um quarto, facilitando a execução de funções diárias tais como: abrir cortinas, acender automaticamente lâmpadas e controlar a temperatura do ambiente. Todas essas funções são acionadas e lidas através de dispositivos móveis com comunicação WiFi a partir de um aplicativo (Blynk) responsável pelo envio e recebimento de sinais para a realização e o monitoramento de cada ação. Nessa proposta, foram utilizados materiais como: placa eletrônica Arduino Uno, conexões elétricas, protoboard para montar circuitos, resistores, um módulo ESP8266 Node MCU para comunicação com a internet, sensor de temperatura, sensor de luz e módulo relé.
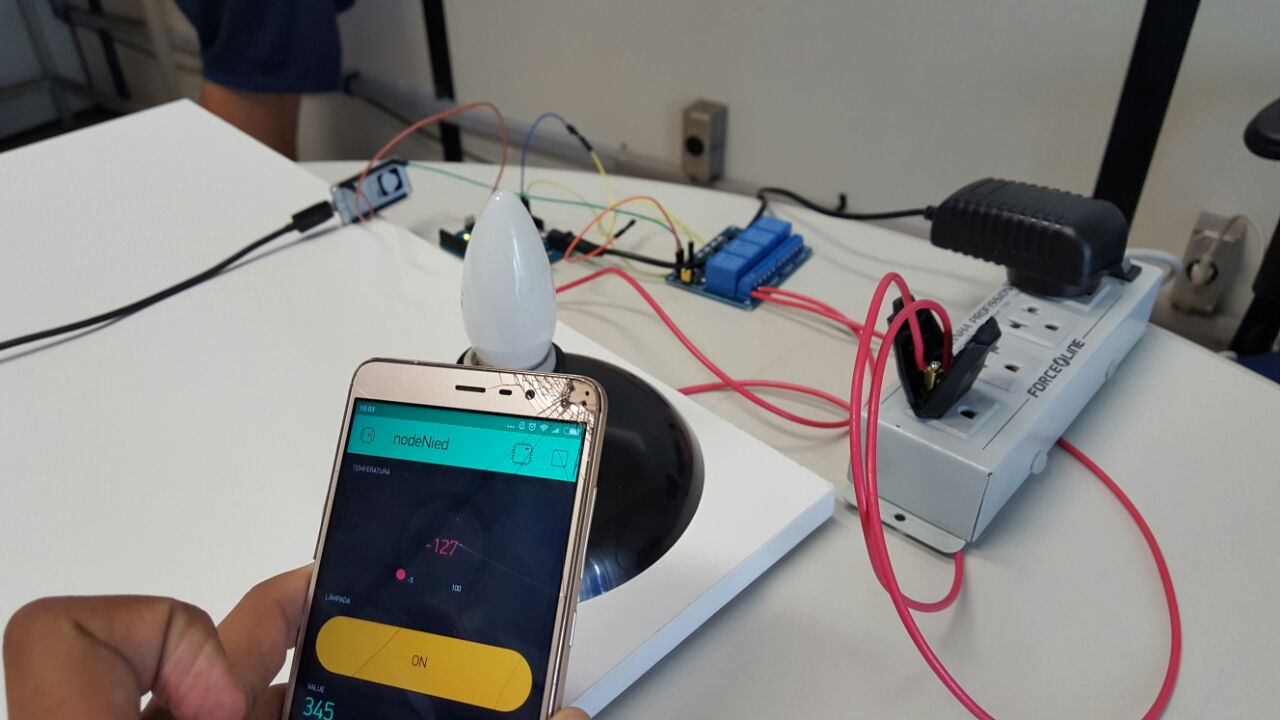
Para realizar a simulação de abrir/fechar a cortina do quarto foi utilizado um mecanismo de “servo motor” que realiza um giro de 180°. Já para o controle da temperatura, foi utilizado um sensor de temperatura que, a partir da variação de sua resistência, retorna um valor de 0 a 1024. Para o controle da iluminação utilizamos um sensor de luminosidade LDR (light dependent resistor) que funciona de forma análoga ao de temperatura, em conjunto com um sensor de presença, bem como o acionamento da lâmpada via aplicativo (botão na tela do celular). No quarto foi colocado uma tomada elétrica cujo funcionamento é controlado a partir do aplicativo. A figura a seguir apresenta o ambiente desenvolvido e a execução de algumas ações, como o acendimento de luz.
 |
 |
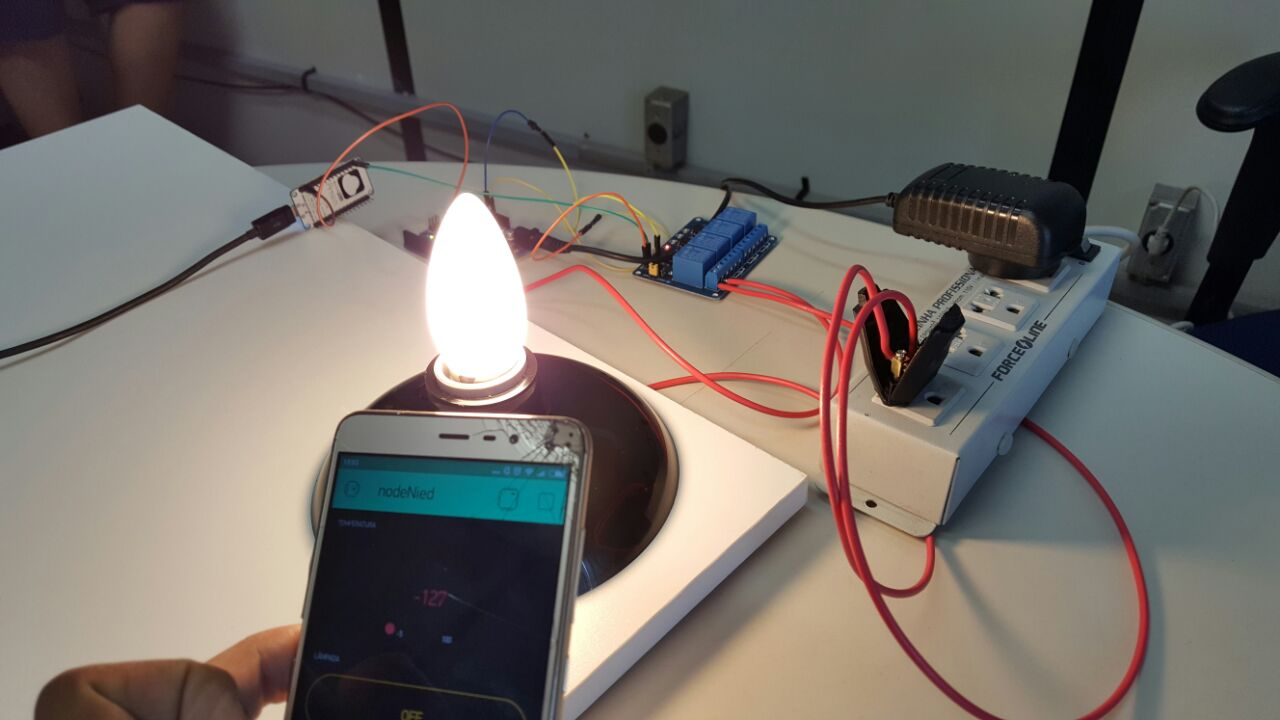 |
| Projeto final do quarto | Aparelho de celular com o aplicativo em execução | Aplicativo acendendo a luz |
| Automação de quartos inteligentes como projeto de RP e IoT | ||
Com a RP um fenômeno similar acontece, pois o processo de concepção, implementação, construção, automação e controle de dispositivos robóticos considera o total envolvimento dos participantes com a tecnologia. Nesse contexto, o pensamento computacional é evidente em sua forma mais expressiva, pois a RP possibilita a criação de situações de aprendizagem para resolver problemas de forma sistemática, segura e divertida.
Entendemos que, no Brasil, a discussão sobre a difusão e implementação do pensamento computacional na educação básica, nos meios acadêmico e científico é relativamente recente, mas tende a evoluir. Supomos que a RP pode contribuir significativamente para esse cenário, embora ainda seja pouco desenvolvida com essa finalidade.
Como perspectiva futura, compreendemos que a RP deve ser pensada como uma tecnologia onipresente, dentro e fora da sala de aula. Essa perspectiva abrange diversos desafios de pesquisa, pois requer considerar cenários menos controlados de uso. Adicionalmente, a RP precisa ser pensada na perspectiva de interação com as pessoas. Necessitamos investigar ambientes de RP e suas propriedades de interação corporificada. Isso significa conceber e avaliar linguagens de interação em que o corpo seja o principal meio de expressão. Isso pode permitir entender melhor como as pessoas produzem sentido na interação com robôs e como esse aspecto pode potencializar o aprendizado de um conteúdo.
Outra linha a ser explorada nas pesquisas se refere ao estudo da afetividade e de aspectos envolvidos na interação social dos participantes na construção e uso de ambientes de RP. Isso envolve meios de projetar as dinâmicas de RP de forma a considerar as emoções dos participantes no design. Adicionalmente, em tempo de execução do software, vislumbra-se capturar as expressões emocionais dos participantes para que o comportamento do robô seja dirigido por elas (Justo et al., 2018). Essa captura pode envolver tecnologias de visão computacional, por exemplo.
Resumindo, acreditamos que as seguintes questões poderão nortear investigações nessa perspectiva:
- Como aprimorar aspectos pedagógicos na RP através do estudo da interação corporificada das pessoas com o ambiente?
- Como projetar ambientes em que o comportamento dos artefatos físicos tenha um acoplamento dinâmico com base nas ações dos participantes e suas emoções?
Considerações finais
Este artigo apresentou as pesquisas desenvolvidas em RP no Nied e seus desdobramentos futuros. Ressaltamos que a discussão sobre RP, a princípio, era voltada para o seu papel como ferramenta para aprendizagem de conceitos, centrada no uso de recursos de software e de hardware na automação e controle dos dispositivos. Atualmente, estamos caminhando para a atuação em um contexto em que se procura entender aspectos – até então considerados marginais nas investigações – como a criatividade, a emoção e a intenção das pessoas na interação com os ambientes de RP.
O contexto atual está permeado de conectividade e ubiquidade considerando tecnologias móveis associadas à automação e ao controle de robôs. Isso tende a permitir novos meios para que as pessoas consigam expressar emoções na interação com os dispositivos. Para tanto, tecnologias precisam ser aprimoradas para permitir a captura e a interpretação de emoções dos participantes ao interagir com robôs. Nesse sentido, ainda que guardando todas as complexidades da implementação e uso dos dispositivos robóticos, que até então se dava a partir do ensino fundamental, seu uso passa a acontecer no ensino infantil, um contexto em que a interação intra e interpessoal adquire um papel preponderante.
Trabalhos futuros vão em direção a essa perspectiva para superar os desafios no projeto, desenvolvimento e avaliação de ambientes de RP nessa proposta de criação, uso e apropriação da tecnologia dentro e fora da sala de aula.
João d’Abreu Vilhete nasceu em São Tomé e Príncipe, na África, e mora no Brasil há mais de trinta anos. É engenheiro eletricista com graduação e mestrado pela Faculdade de Engenharia Elétrica e Computação da Unicamp e doutor em engenharia mecânica também na Unicamp. Pesquisador no Nied desde 1987 desenvolvendo principalmente pesquisas na área de robótica e tecnologias educacionais envolvendo implementação de hardware/software e de ambientes de aprendizagem baseados na utilização de dispositivos robóticos. E-mail jvilhete@unicamp.br.
Julio Cesar é professor no Instituto de Computação (IC) da Unicamp. Possui doutorado em ciência da computação (2014) pela Faculdade de Ciências da Universidade de Paris-Sud XI (França), mestrado em ciência da computação (2011) pelo IC e graduação em tecnologia em informática (2008) pela Faculdade de Tecnologia da Unicamp. E-mail jreis@ic.unicamp.br.
Referências
D’Abreu, J. V. V. “Robótica pedagógica: percurso e perspectivas” In: V Workshop de Robótica Educacional, 2014, São Carlos. Anais do 5º Workshop de Robótica Educacional – WRE 2014. Porto Alegre: Sociedade Brasileira de Computação – SBC, 2014. v.01. p. 79 – 84.
D’Abreu, J. V. V.; Garcia, M. F. “Robótica pedagógica no currículo escolar: Uma experiência de transposição didática” In: IV Conferência Ibérica Inovação na Educação com TIC, 2016, Bragança. Livro_actas_ieTIC2016-2- IV Conferência Ibérica Inovação na Educação com TIC. Bragança: De Facto Editores, 2016. v.01. p.83 – 97.
D’Abreu, J. V. V.; Ramos, J. G.; Mirisola L. G. B.; Bernardi, N. “Robótica educativa/pedagógica na era digital” In: II Congresso Internacional TIC e Educação, 2012, Lisboa. Atas do II Congresso Internacional TIC e Educação. Lisboa: Instituto de Educação da Universidade de Lisboa, 2012. v.01. p.2449 – 2465.
D’Abreu, J. V. V.; Ramos, J. G.; Mirisola, L. G. B. “Ambiente de robótica pedagógica com Br-GoGo e computadores de baixo custo: uma contribuição para o ensino médio In: 22º Simpósio Brasileiro de Informática na Educação e 17º Workshop de Informática na Escola, 2011, Aracaju. Anais do Simpósio Brasileiro de Informática na Educação. 2011. v.01. p.100 – 109.
Garcia, M. J. Robótica Educativa. “La programación como parte de un proceso educativo”. RED. Revista de educación a distância. Núm. 46, 2015. DOI: 10.6018/red/46/5.
Justo, A.; Jensen, F. R.; Bonacin, R.; Calado, I.; Dos Reis, J. C. “Exploring ontologies to improve the empathy of interactive bots”. In: Proceedings of the 27th IEEE International Conference on Enabling Technologies (WETICE’18). Paris, France, pp. 261-266, 2018.
Sipitakiat, A.; Blikstein, P.; Cavallo, D. “GoGo Board: Augmenting programmable bricks for economically challenged audiences”. Proceedings of the International Conference of the Learning Sciences. Los Angeles, USA, 2004.
Zapata, M. R. “Pensamiento computacional: uma nueva alfabetización digital”. RED. Revista de educación a distância. Núm. 46, 2015. DOI: 10.6018/red/46/5. Disponível em: <http://www.um.es/ead/red/46/zapata.pdf>. Acesso em 21/09/2017.
[1] Atualmente, essas discussões se dão por meio da Web, utilizando algum ambiente de ensino a distância (EaD).